ARBOTO - Robotic Tool Carrier Prototype
For ARBOTO, a company operating in the tree nursery sector, we have designed and prototyped a versatile and offroad-worthy vehicle which serves as a carrier for their sensors.
Operation in tree nurseries is a challenging environment due to the limited grip, height differences and obstacles, puddles and mud, … The combination of these elements resulted in a specific set of requirements such as 4 wheel electric drive to maximize power and grip, and 4 wheel steering to enable nimble behaviour en zero-turn characteristics.
Exobotic developed this robot from the ground up, spanning over electromechanical design, electronics, navigation and software. Through an iterative process, within less than one year, we were able to present to the customer a fully functioning pre-production robot which is usable in the defined environments. The versatility of the developed robot makes it also applicable in other sectors.
“The Exobotic team surpassed our expectations in designing a robot which functions not only in a lab environment, but also in the tough environments we operate daily!”
Description
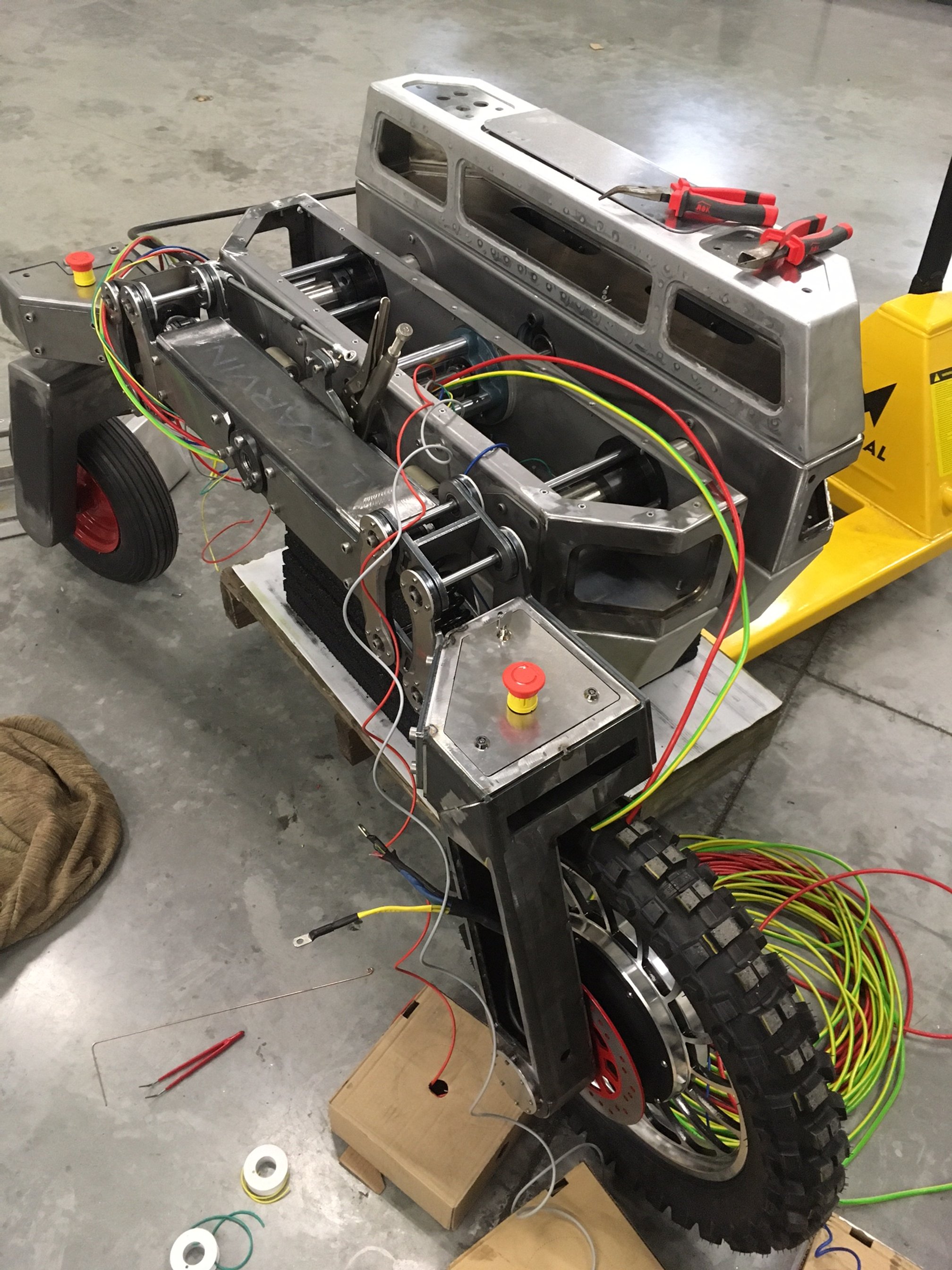
The robot is a multipurpose tool carrier with a patent pending modular design that allows it to be configured easily for multiple applications while still keeping its payload body balanced out on rough terrain. Replacing two centrally located mounting rods on which payloads can be mounted, allows the robot’s wheelbase width to be changed as desired. Thanks to its spring damped suspension and its centrally rotating payload area, vibrations are reduced to a minimum. The robot uses a battery plug system for fast and easy in field battery replacement and a 4×4 drive system where each wheel can be controlled independently, allowing it to drive in all directions.
Characteristics
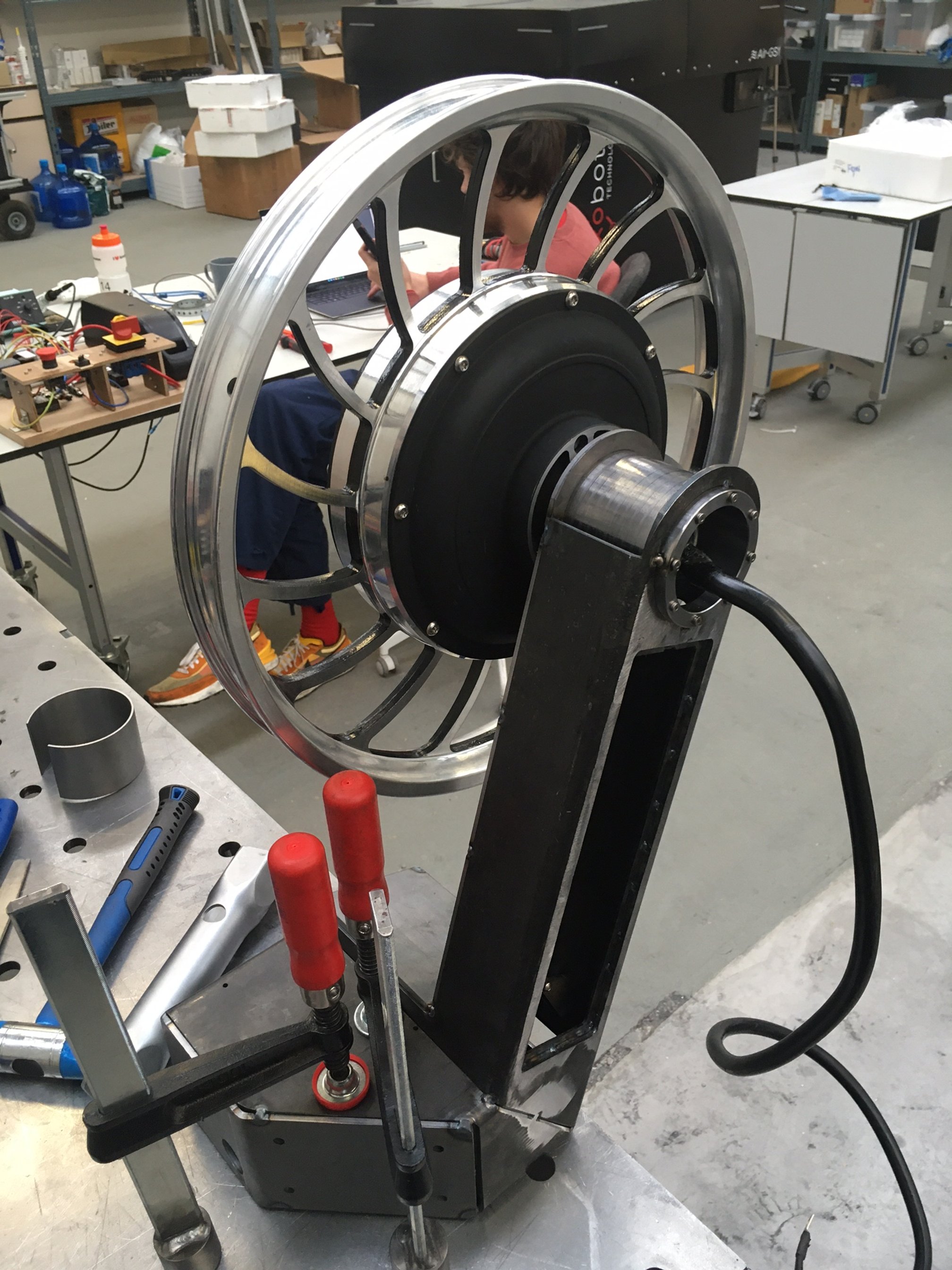
The robot uses specially designed motors that deliver a nominal torque of 100 Nm (max 320 Nm) per wheel. This makes the robot very powerful for its small size and weight. At nominal torque, the robot can drive around 6 km/h max. The robot can carry payloads up to 200 kg for a centrally mounted payload/implement. Traction power is sufficient for most monitoring and crop care activities. The robot is not suitable for heavy tillage (ploughing or deep cultivation).
Navigation
The robot will be able to navigate autonomously, fully based on a dual antenna RTK-gps. Starting from instructions of the user in a GUI, the robot will interpolate the path between a set of gps positions and navigate smoothly between them. Obstacle avoidance is ensured by a lower LiDAR-based system. In case obstacles would come too close, the robot would slow down and stop. Optional AI-based classification of obstacles is available to reduce false-positive detections. This system uses multiple cameras to perceive its environment. Onboard sensors use active infrared or white lighting (e.g., LiDAR and optional cameras) to operate in low light conditions.
This fully functioning autonomous vehicle is available for sale by Exobotic, either as-is or modified according to your specific needs, environment and tools.